GPIO 基础
Author:余生
一、GPIO 基础概念
1. 什么是 GPIO?
- 全称:General Purpose Input/Output(通用输入输出)
- 作用:STM32 通过 GPIO 引脚与外部设备交互(如点亮 LED、读取按键)。
- 特点:每个引脚可独立配置为输入 / 输出模式,支持多种工作方式。
2.STM32 引脚分类
| 引脚类型 | 颜色标记 | 功能说明 | 示例引脚 |
|---|---|---|---|
| 电源引脚 | 红色 | 供电(VBAT, VDD, GND) | VBAT, VDD_1 |
| 系统引脚 | 蓝色 | 复位 / 晶振 / 下载(NRST, OSC) | NRST, OSC_IN |
| GPIO 引脚 | 绿色 | 数据输入输出(PA0-PC15) | PA0, PC13 |
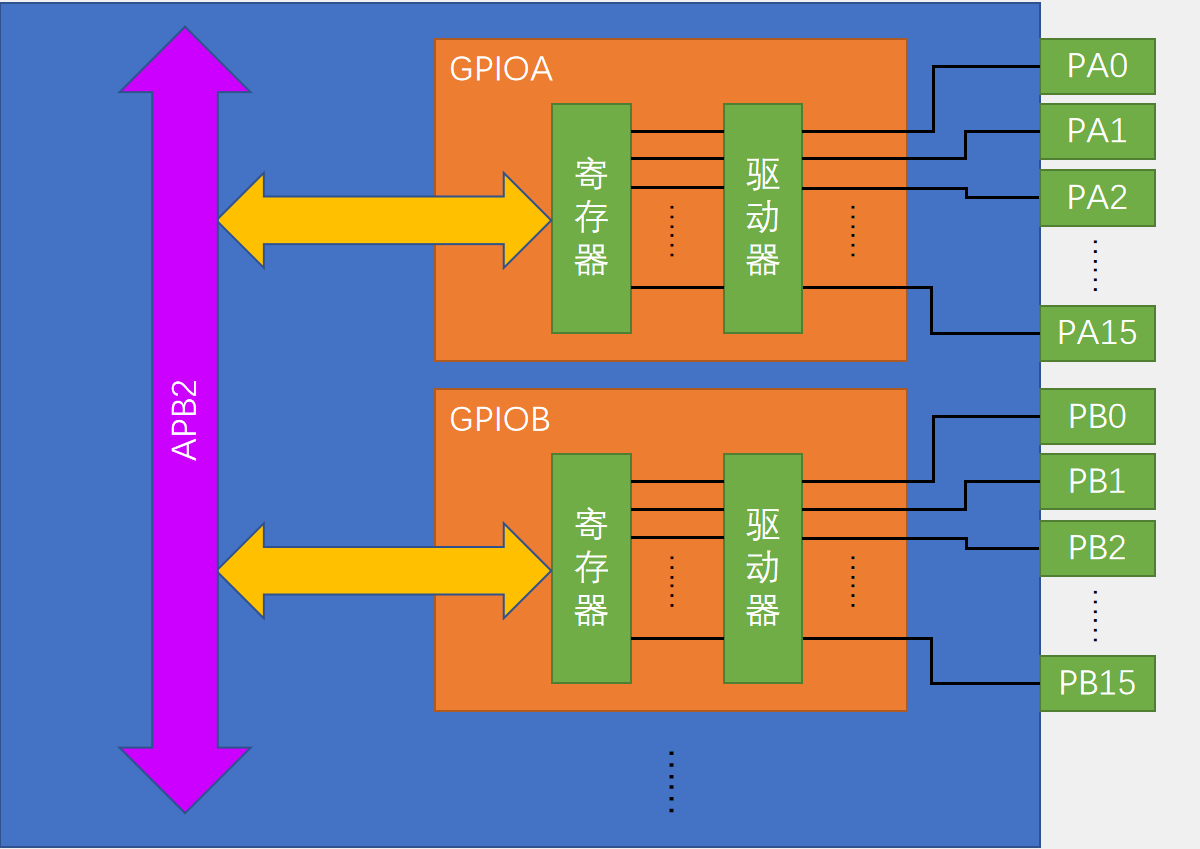
3.GPIO 的基本结构
GPIO 通常包括以下部分:
- 寄存器:用于配置 GPIO 的工作模式和读写电平。
- 驱动器:增强 GPIO 引脚的驱动能力。
- APB2 总线接口:通过此接口,内核可对寄存器进行读写操作。
GPIOA/GPIOB
“万能插线板”,每个引脚都能变身!
想象这是一块 “万能插线板”(芯片上的引脚模块),分 A、B 两块,每块有 16 个孔(PA0~PA15、PB0~PB15)。
- 每个孔(引脚)能干啥?
- 当它是 “电源插孔”:输出高电平(比如 3.3V),相当于 “通电”;输出低电平(0V),相当于 “断电”。
- 当它是 “信号插孔”:外部设备(比如传感器)按一下按钮,插孔就会有电平变化,你就能 “读” 到这个信号。
- 关键:每个孔的功能(输入 / 输出 / 特殊功能)由 “寄存器” 提前设置好,就像给插孔贴标签:“这个孔今天当电源口,那个孔当信号接收口”。
寄存器
“插线板的说明书 + 开关总控”
每个 GPIO 模块(A/B)里有一堆绿色小盒子(寄存器),分 3 类最常用的:
- 配置寄存器(CRH/ CRL)—— 给引脚贴标签
- 比如你想让 PA0 当 “输出口”(能控制它输出高低电平),就在配置寄存器里找到 PA0 对应的 “开关位”,拨到 “输出档”。
- 如果拨到 “输入档”,PA0 就变成 “信号耳朵”,能监听外部有没有电平变化。
- 数据寄存器(ODR/IDR)—— 直接控制 / 读取引脚状态
- 输出时:往 ODR 寄存器里写 “1”,对应的引脚(比如 PA0)就会输出高电平;写 “0” 就输出低电平。 (ODR 就像一个 “总开关面板”,每个二进制位对应一个引脚的开关状态)
- 输入时:直接从 IDR 寄存器里 “看” 对应位是 1 还是 0,就知道外部有没有给信号。
- 其他寄存器(比如 BSRR、BRR)—— 细节操作
- 比如 BSRR 寄存器可以单独把某个引脚置 1 或清 0(比直接操作 ODR 更方便),BRR 专门用来清 0(关灯更快)。
驱动器
“电信号的快递员”
寄存器下了命令,但引脚离得远,需要 “快递员” 把信号送到家门口 —— 这就是驱动器。
- 工作原理:寄存器输出的 “小电流信号” 太弱,驱动器就像一个 “信号放大器”,把 “微弱的小电平” 变成足够强的电信号,让引脚能稳定输出或接收。
- 为什么需要?:如果直接让寄存器连引脚,信号会被 “拖垮”(类似用细电线带大功率电器会跳闸),驱动器就是加粗的 “电线”,保证信号不失真。
APB2 总线
“小区的主干道,连接管理中心和插线板”
整个 GPIOA/B 模块不是独立存在的,它们通过一条紫色 “主干道”(APB2 总线)连接到 CPU(或芯片的核心部分)。
- CPU 怎么控制 GPIO?
- CPU 通过 APB2 总线找到 GPIOA/B 模块(就像开车上高速,先走 APB2 这条路)。
- 到达后,往对应的寄存器(说明书 + 开关)写命令(比如 “让 PA5 输出 1”)。
- 驱动器收到命令,把信号送到 PA5 引脚,完成操作。
- APB2 vs 其他总线: 不同的总线(比如 APB1、AHB)相当于小区里的不同主干道,速度和带宽不同。APB2 通常负责高速外设(如 GPIO、定时器),APB1 负责低速外设(如 UART、I2C)。
实际应用举例
“让 LED 灯亮起来”
假设你想让 PA0 引脚接的 LED 灯亮:
- 第一步:配置 PA0 为输出口
- 往 GPIOA 的配置寄存器(CRH/CRL)里找到 PA0 对应的位,设置为 “输出模式”。
- 第二步:让 PA0 输出高电平
- 往 GPIOA 的数据寄存器(ODR)的第 0 位写 1(二进制 0000 0000 0000 0001)。
- 结果:驱动器把高电平信号送到 PA0,LED 灯亮。
总结
整个流程就是 “写指令→放大信号→控制引脚”
- 软件层面:你通过代码往寄存器写 0 或 1(比如
GPIOA->ODR |= 1<<0;)。 - 硬件层面:寄存器的命令→驱动器放大→引脚真的输出高 / 低电平。
- 核心思想:所有对硬件的操作,最终都是通过 “改寄存器的值” 实现的,寄存器就是你和硬件对话的唯一语言。
记住这个逻辑,以后学任何单片机(STM32/Arduino/51 单片机),都是这套 “寄存器控制引脚” 的套路,只是寄存器的名字和地址可能不同,但本质完全一样
关键点:
- 一个引脚可能有多个功能(复用功能),通过寄存器配置切换(如 PA9 可以是普通 IO 或串口 TX)。
二、GPIO 工作模式
8 种模式详解
C
typedef enum {
GPIO_Mode_AIN = 0x0, // 模拟输入(用于ADC)
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入(按键检测)
GPIO_Mode_IPD = 0x28, // 下拉输入(默认低电平)
GPIO_Mode_IPU = 0x48, // 上拉输入(默认高电平)
GPIO_Mode_Out_OD = 0x14, // 开漏输出(需外部上拉)
GPIO_Mode_Out_PP = 0x10, // 推挽输出(直接驱动LED)
GPIO_Mode_AF_OD = 0x1C, // 复用开漏(I2C)
GPIO_Mode_AF_PP = 0x18 // 复用推挽(串口、SPI)
} GPIOMode_TypeDef;模式选择场景
| 模式名称 | 性质 | 特征 |
|---|---|---|
| 浮空输入 | 数字输入 | 可读取引脚电平,若引脚悬空,则电平不确定 |
| 上拉输入 | 数字输入 | 可读取引脚电平,内部连接上拉电阻,悬空时默认高电平 |
| 下拉输入 | 数字输入 | 可读取引脚电平,内部连接下拉电阻,悬空时默认低电平 |
| 模拟输入 | 模拟输入 | GPIO 无效,引脚直接接入内部 ADC |
| 开漏输出 | 数字输出 | 可输出引脚电平,高电平为高阻态,低电平接 VSS |
| 推挽输出 | 数字输出 | 可输出引脚电平,高电平接 VDD,低电平接 VSS |
| 复用开漏输出 | 数字输出 | 由片上外设控制,高电平为高阻态,低电平接 VSS |
| 复用推挽输出 | 数字输出 | 由片上外设控制,高电平接 VDD,低电平接 VSS |