第二章:嵌入式操作系统核心概念
嵌入式操作系统不是缩小版的 Windows,它是为 “资源紧张型” 设备量身定制的微型调度大师。它不能出错、不能拖延,还得在几十 KB 内存里井井有条地调度任务 —— 可以说是极限打工了。本章,我们就来了解学习一些核心概念,如任务、内存和文件系统,理解操作系统是怎么协调一群任务,让它们既能各司其职,又能井然有序地工作的。
2.1 进程线程?任务调度!
🧵 任务(Task)与线程 / 进程的区别
在操作系统中,进程 (Process) 和 线程 (Thread) 是并发执行的两种基本单位:
- 进程:资源分配的基本单元,拥有独立的地址空间、文件描述符和系统资源。操作系统为每个进程分配受保护的内存区域。
- 线程:CPU 调度的基本单元,属于进程内的执行流。同一进程的所有线程共享代码段、数据段和系统资源,但各自拥有独立的栈空间、程序计数器和寄存器状态。
在桌面操作系统里,我们常常接触 “进程(Process)” 和 “线程(Thread)”。但在嵌入式操作系统,尤其是 RTOS(Real-Time Operating System)中,我们讨论的通常是 “任务(Task)”。
✅ 什么是 Task?
Task 就是嵌入式 RTOS 中最基本的调度单位。可以把它理解成 “轻量版线程”,只不过在资源紧张的设备上,它更加务实 —— 共享内存,少动资源,说干就干。
🧠 它和进程 / 线程有啥不一样?
| 特性 | 桌面操作系统中的进程 / 线程 | 嵌入式 RTOS 中的 Task |
|---|---|---|
| 名称 (废话) | Process / Thread | Task |
| 地址空间隔离 | 有(通过 MMU) | 通常没有(大多 MCU 无 MMU) |
| 创建开销 | 较大 | 非常小,适合频繁创建 / 销毁 |
| 运行上下文 | 独立堆栈和寄存器状态 | 拥有独立堆栈,寄存器由 TCB 保存 |
| 通信方式 | 进程间需要 IPC,线程共享内存 | 任务之间共享全局内存 + 信号量 / 消息队列 |
| 适用场景 | 多任务桌面 / 服务器系统 | 实时控制、低功耗、资源有限的设备 |
🔍 小结:Task 类似线程,但设计更轻巧、更适合嵌入式。大多数 RTOS 并不支持 “进程” 这个概念,所有 Task 在同一个地址空间中协作完成工作。
🔁 Task 的生命周期与状态管理
嵌入式 RTOS 不需要 “复杂的人生哲学”,但 Task 的 “生命周期” 依然精巧有序:
🔄 生命周期五态模型
创建(Created)
初始化堆栈、设置 TCB(任务控制块)、分配优先级,任务准备上线。就绪(Ready)
任务已满足运行条件,正在等调度器分配 CPU 时间。运行(Running)
任务获得 CPU 控制权,正在执行代码。阻塞(Blocked)
任务在等待某个事件,例如信号量、消息队列或超时。终止(Terminated)
任务退出,释放资源,TCB 被回收(有的 RTOS 支持任务删除)。
🧠 TCB(Task Control Block)存储哪些信息?
每个任务对应一个 TCB,RTOS 就靠它来调度任务:
- 当前任务状态
- 寄存器快照(用于上下文切换)
- 堆栈指针
- 任务优先级
- 延时计数器
- 等待资源指针(如信号量或队列)
⚙️ 上下文切换机制(Context Switch)
RTOS 在任务切换时,必须保存当前任务的 “脑内状态”,以便下次还能从断点恢复。过程如下:
- 保存当前任务的 CPU 寄存器状态到 TCB
- 从新任务的 TCB 中恢复 CPU 寄存器
- 更新堆栈指针,切换堆栈
- 恢复程序计数器,继续执行新任务
⏱ 嵌入式中,任务切换速度非常关键,RTOS 常用汇编手动管理上下文,尽可能减少切换耗时。
🧮 调度算法与嵌入式系统中的应用
调度算法是 RTOS 的核心,它决定了 “谁先执行、谁等一下”。RTOS 的调度算法和普通单片机比如 stm32 常用的任务循环,使用中断和嵌套中断的单任务系统 (前后台系统) 不同,这里引用一张比较清晰但是不那么清晰的图来表示 RTOS 的任务调度: 图片来源:正点原子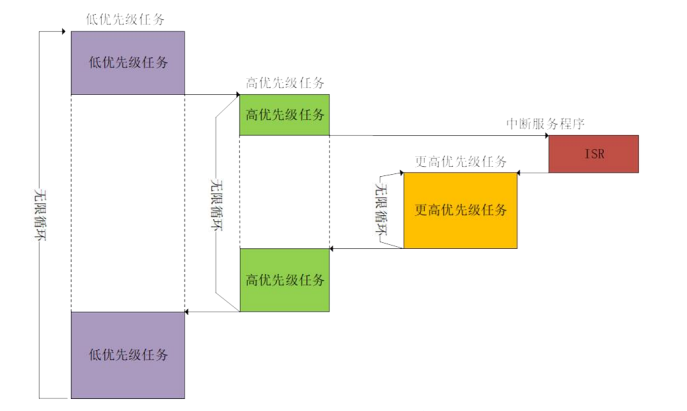
1️⃣ 固定优先级抢占式调度(常见于 FreeRTOS)
每个任务创建时就指定一个优先级(通常是 0~N,数字越小优先级越低),RTOS 会始终运行优先级最高的 Ready 状态任务。
- 任务 A 优先级 3,任务 B 优先级 5,当 B 就绪时,立即抢占 A
- 如果多个任务优先级相同,使用时间片轮转
- 非常适合实时性强的控制场景
📌 嵌入式重点是 “抢占”,低优先级任务不能阻塞高优先级任务,否则会出事!
2️⃣ 时间片轮转调度(Round Robin)
- 多个任务具有相同优先级
- 每个任务分配固定时间片(比如 5ms)
- 时间片耗尽后放入就绪队列尾部,等待下轮执行
适用于后台日志处理、UI 渲染等非关键任务,不能用于强实时控制逻辑。
3️⃣ 优先级继承机制(Priority Inheritance)
当高优先级任务需要的资源被低优先级任务占用时,低优先级任务会 “临时升职” 提升优先级直至释放锁,避免阻塞高优先级任务。
这是嵌入式 RTOS 的重要特性,用于防止 “优先级反转”:
如果高优先级任务 A 被低优先级任务 B 持有的互斥锁阻塞,而 B 又因更低的任务 C 占用 CPU 无法释放锁,A 迟迟得不到执行,系统就宕机了。
4️⃣ 动态调度策略(较少见)
一些更强大的嵌入式 RTOS(如 RTEMS、Zephyr)支持:
- EDF(Earliest Deadline First):谁的截止时间最早,谁先执行
- RMS(Rate Monotonic Scheduling):周期短的任务优先级更高
这类调度适用于高端实时应用,如工业自动化、机器人系统等。
🧪 举个栗子:任务调度在实际项目中的体现
假设你在做一个智能风扇控制器,功能包括:
- 温度采集(采样任务,10ms 周期)
- 电机控制(高优先级,实时调整转速)
- 显示更新(中优先级,每 100ms 一次)
- 云同步日志(低优先级,有空再处理)
调度设计可能如下:
| 任务 | 周期 | 优先级 | 说明 |
|---|---|---|---|
| 电机控制任务 | 持续 | 高 | 必须立即响应温度变化 |
| 传感器读取任务 | 10ms | 中高 | 周期精确,直接影响控制效果 |
| 显示更新任务 | 100ms | 中 | 可延迟 |
| 云日志上传任务 | 不定 | 低 | 系统空闲时才执行 |
调度器就会根据这个优先级体系,自动安排这些任务的执行先后,确保 “关键的先做、次要的顺延”。
🧩 总结提醒:
- 嵌入式 RTOS 调度的是 Task,不是进程或线程
- 所有任务共享地址空间,调度轻量高效,但需要开发者小心资源同步
- 调度机制通常基于固定优先级 + 抢占,为的是及时响应
- 遇到资源冲突,优先级继承机制是必须掌握的调度防护手段
- 选什么调度策略,要看应用对 “实时性” 的硬性要求